2024-04-03
Share



Representatives from F4E, VTT, ITER Organization, ITER Korea, ITER Japan to witness the Divertor Cassette Remote Handling system demonstration, DTP2, Finland, January 2024. ©VTT
Tampere is well known for its vibrant economic activity and innovation cluster by hosting one of Finland’s most reputable research centres—VTT. Robotics happens to be an area of their expertise, which has the potential to change commerce, logistics, medicine, transportation, missions to space. ITER could be no exemption to this, given the fact that it will use a sophisticated remote handling system with man-in-the-loop robotics and virtual reality. It’s necessary to maintain, replace, and repair components in the heart of the device, which engineers cannot get in contact with, because of their exposure to radiation.
Driving through the gates of this facility covered in snow, one has a certain déjà vu feeling of the laboratories seen in films—quiet on the surroundings yet buzzing with fascinating work inside. Much of the R&D carried out here is about the future. Here is the home of the Divertor Test Platform (DTP2), a facility with a control room, special remote handling equipment, and a real size prototype of an ITER Divertor Cassette, which weighs roughly 10 tonnes and measures 3.5 m long by 2.5 m high. If you are up for a challenge, try moving this bulky component with the precision of half a millimeter!

ITER will count with 54 of these cassettes which make up the divertor, a massive “ashtray” where most of the plasma impurities fall in. Due to the extreme heat and radiation some of the cassettes will need to be replaced and transported out of the device. F4E has been financially supporting DTP2 through various technology grants via EU funds, to develop and test key technologies linked to the divertor remote handling system for which Europe is responsible. In this facility, engineers have been working to put together the pieces of this system for ITER.
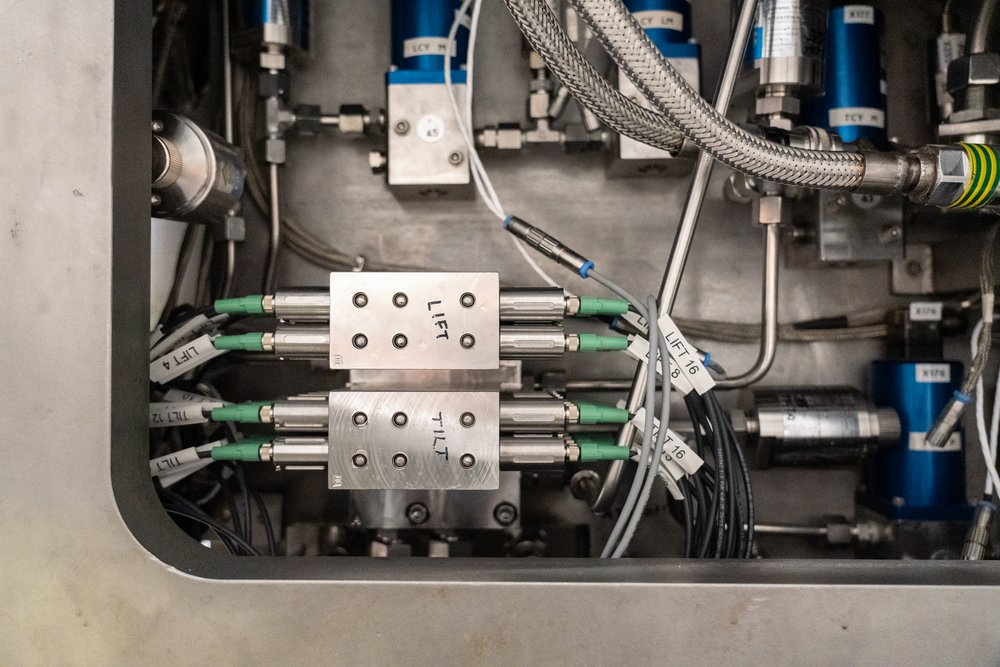
The partnership between F4E with VTT and Tampere University counts more than a decade and it has been marked by many technical achievements. For example, the use of digital hydraulic valves in remote handling has been a game changer in guaranteeing a more precise and reliable operation of the system. The work resulted from the collaboration of Tampere University, Fluiconnecto Oy and Tamlink Oy. The system is made of 16 fast, small, and simple on/off valves operating simultaneously. They are much more resilient, and contrary to servo valves where the system relies solely on one, digital valves offer a combination of many. In the event of a valve failure, the remaining ones can continue performing the task and still provide the required performance. These valves were successfully installed and tested on the Cassette Multi-functional Mover (CMM)—the device that is meant to transfer the divertor cassette prototype.
Furthermore, the design and deployment of GENROBOT, a generic robotics software of outstanding quality made in Europe, has also been extremely important. It was upgraded and tested by F4E and GTD to help the different parts of the remote handling system to work well together in perfect harmony. In fact, every millisecond GENROBOT performs a full control cycle on all components of the CMM. Much of the development of the software took place during the COVID-19 pandemic, which advanced via online meetings between teams in Spain and Finland. After having released various versions of the software, the time was right to integrate it in DPT2, and see how it would work in practice.

How would the valves and software work together in performing a full operation? To answer this question, F4E and VTT invited their contractors, ITER Organization, delegates from ITER Japan and Korea to witness a system demonstration. A cassette replacement operation was carried out using the hydraulic valves, GENROBOT and 3DNode, a camera vision system tracking with incredible accuracy objects that are relevant for the task.
The operators took their usual positions in the control room in front of the big screens, displaying different programs. With their help, they were able to command, control and view in 3D the divertor handling device. The machines were on standby mode to perform the drill in front of all delegates. A team of people stood by the structure, where the divertor cassette is located, to follow closer the trajectory. The result was a resounding success! The divertor cassette was transported along its full trajectory with precision. The entire remote handling system operated smoothly without any glitch. In fact, one of the takeaways is to transfer this know-how to other remote handling systems for the Cask and Plug or the Neutral Beam.

What more can we learn from the system demonstration? “We now know that the digital valves are more reliable, friendlier to the operator and suitable for ITER because they can run in different control modes. The work that Europe has financed paid off and can be applied in areas beyond fusion,” explains Salvador Esque, F4E Remote Handling Officer responsible for the progress of this equipment. GENROBOT was also in the spotlight. We spoke to Emilio Ruiz Morales, F4E Remote Handling, who led the team of engineers developing the software. “DTP2 offers an excellent environment to test and prepare for the remote handling systems of ITER’s first assembly phase. Work can now start on the new versions of GENROBOT versions aiming to simplify and optimise operations.” Carlo Damiani, F4E’s Programme Manager for Remote Handling, elaborated on the important role that Europe can play in this domain. “In this technology area we have invested in people to acquire new skills and deepen expertise by developing and validating new technologies. We have financed a test facility which has become a centre of excellence in this field, which could be further exploited for ITER’s real remote handling operations. With F4E’s involvement in this project, we are strengthening Europe’s leadership.”